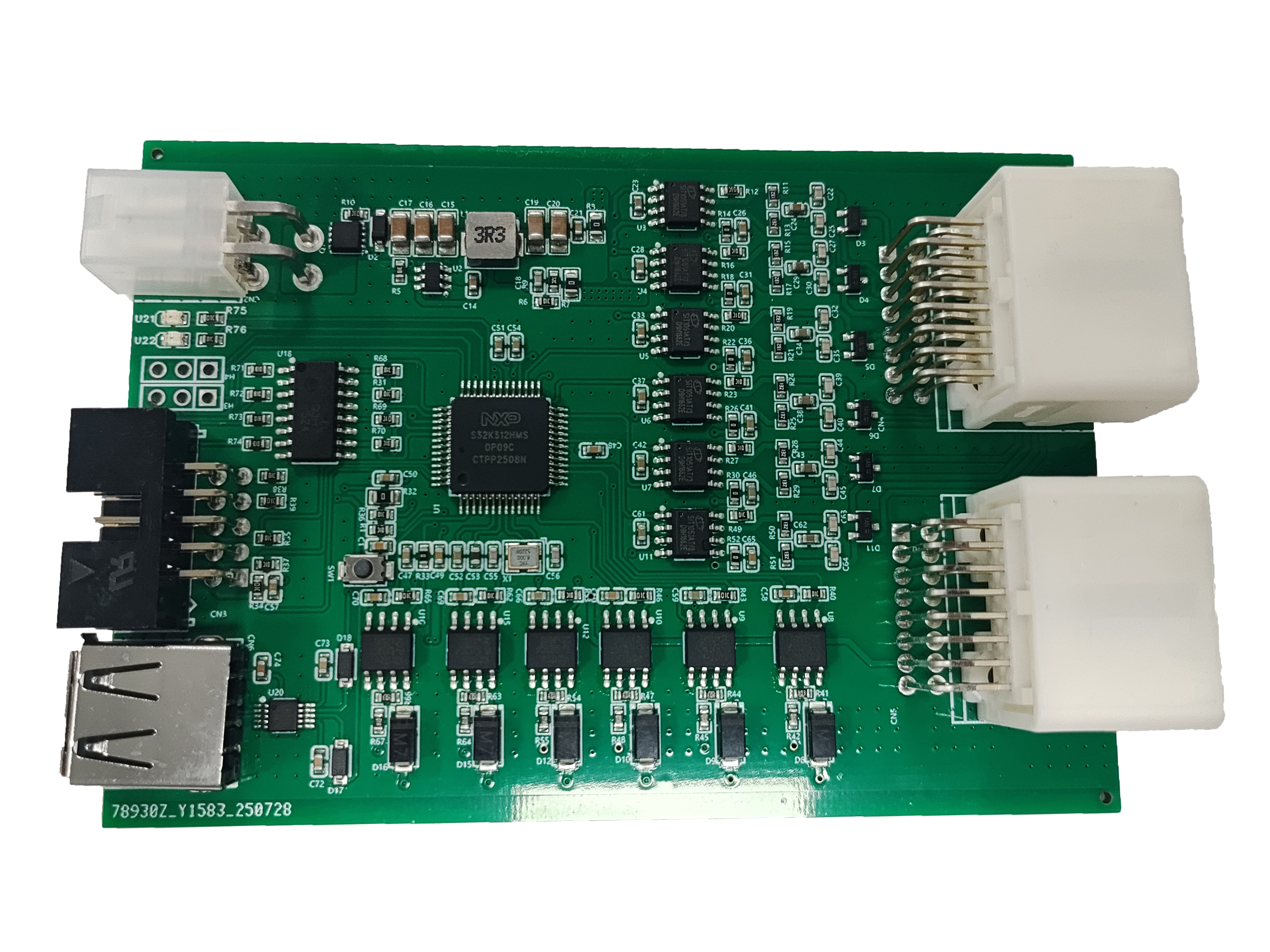
I. Descripción general del producto Este controlador está diseñado con base en el microcontrolador automotriz de alto rendimiento NXP S32K312, que integra 6 interfaces de comunicación CAN (incluyendo CAN FD) y 6 LIN. Está construido específicamente para escenarios de comunicación de red complejos, como la electrónica automotriz y la automatización industrial. A través del diseño de arquitectura modular, el producto realiza procesamiento colaborativo multiprotocolo, admite el nivel de seguridad funcional ASIL-B, cumple con los requisitos de confiabilidad a nivel de vehículo y puede aplicarse ampliamente en campos clave como el control de la carrocería, el tren motriz y la puerta de enlace inteligente. Ventajas principales - Alta integración: Un solo chip integra 6 CAN FD y 6 LIN, lo que reduce el área de PCB y el costo de la lista de materiales. - Rendimiento en tiempo real: El núcleo Cortex-M7 con una frecuencia principal de 160 MHz, combinado con módulos de aceleración de hardware, garantiza una pérdida de trama cero en la comunicación. - Seguridad funcional: Protección de memoria ECC incorporada y temporizador de vigilancia, compatible con el estándar ISO 26262 ASIL-B. - Diseño de bajo consumo: Admite múltiples modos de suspensión, con un consumo típico de <5 mA, lo que satisface las necesidades de ahorro energético de los vehículos de nueva generación. II. Análisis de la arquitectura de hardware 1. Unidad de control principal - Selección de chip: NXP S32K312 (núcleo ARM Cortex-M7) - Frecuencia principal de 160 MHz, 1 MB de Flash, 192 KB de SRAM - Módulo de cifrado de hardware integrado (AES-128/256) - Admite un amplio rango de temperatura de funcionamiento de -40 ℃ ~ 125 ℃ 2. Módulo de comunicación CAN - Configuración de la interfaz: - 6 canales CAN FD independientes (compatibles con CAN 2.0B) - Cada canal admite una velocidad de datos máxima de 8 Mbps - Transceptor TCAN1044VDRBRQ1 integrado (certificado AEC-Q100) - Características clave: - El hardware es compatible con el estándar ISO 11898-1: 2015 - 32 buzones configurables, que admiten filtrado y enmascaramiento de ID - Función de comunicación activada por tiempo (TTCAN) integrada - Mecanismos de detección y recuperación de errores (error activo, error pasivo, bus apagado) 3. Módulo de comunicación LIN - Configuración de la interfaz: - 6 canales CAN FD independientes Canales LIN 2.2A - Cada canal admite una velocidad de datos de 20 kbps - Transceptor TJA1021T integrado (compatible con la especificación LIN 2.x) - Características principales: - El hardware admite conmutación automática entre nodos maestro/esclavo - Rango de ID de trama 0x00-0x3F, compatible con comprobación mejorada (PID) - Gestión de fuente de activación integrada (activación local/activación remota) - Admite programación LIN activada por tiempo 4. Gestión de energía - Fuente de alimentación del sistema: - Rango de entrada: 9 V ~ 36 V (admite sistemas integrados de 12 V/24 V) - Chip base del sistema FS2303B integrado (SBC) - Voltaje de salida: 3,3 V (±1 %), 5 V (±2 %) - Funciones de protección: - Protección contra sobretensión (supresión transitoria de 42 V) - Protección de conexión inversa (protección de puente de diodos) - Protección contra cortocircuitos (limitación automática de corriente) IV. Escenarios de aplicación típicos 1. Módulo de control de la carrocería (BCM) - Implementación de funciones: - Controlar dispositivos de baja velocidad como ventanas, limpiaparabrisas,y espejos retrovisores a través de 6 canales LIN - Comunicarse con dispositivos de alta velocidad como ECU, BMS y ESP a través de 6 canales CAN - Indicadores de rendimiento: - Tiempo de respuesta LIN <50 ms - Tasa de carga del bus CAN <30% (500 kbps) 2. Controlador zonal - Implementación de funciones: - Gestión de red zonal (zonas izquierda/derecha/delantera/trasera) - Distribución de energía y diagnóstico de fallas - Indicadores de rendimiento: - Admite redes de más de 100 nodos - Tiempo de recuperación de fallas <10 ms 3. Puerta de enlace inteligente - Implementación de funciones: - Conversión de protocolo CAN/LIN - Enrutamiento y filtrado de datos - Servicios de diagnóstico (UDS sobre CAN) - Indicadores de rendimiento: - Rendimiento máximo: 48 Mbps (6 canales CAN FD a máxima velocidad) - Retardo de enrutamiento <100 μs Este controlador proporciona una solución de red flexible y confiable para sistemas electrónicos automotrices a través de interfaces de comunicación multiprotocolo altamente integradas. Su diseño a nivel de vehículo y su capacidad de procesamiento de alto rendimiento pueden reducir significativamente la complejidad del sistema y acortar el ciclo de desarrollo, convirtiéndolo en la unidad de control central de la nueva generación de vehículos inteligentes conectados.